“Effectively they attempt to patent the exact thing every good driver does.”
The purpose of Project Troglodyte is to hunt for bad patents and to show what went wrong. For more information, see the web page.
DIAGNOSIS AND REPAIR FOR AUTONOMOUS VEHICLES
This patent is analyzed as part of a series of Google driverless car patents and applications. It is an emerging technology area which, I feel, will have a significant impact in 7-20 year time frame, perhaps even earlier. Existing Intellectual Property will make a difference on how the field develops.
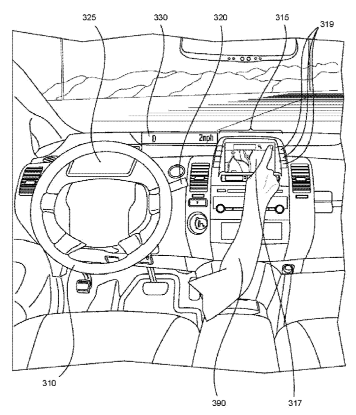
Figure 1.
TIER 1: SUMMARY
A system where sensor information is used to determine wear or damage to parts of the vehicle, this information is then combined with information from environmental sensors and with map data to alter behaviour of the vehicle. For example: if the brakes are worn the system would use smaller deceleration than when the brakes are new. This is done to extend the life of the brakes, presumably until they can be overhauled. While the claims don’t seem to include it, the description also introduces a possibility for the vehicle to automatically seek a repair facility.
If this application is granted as is, it would likely cover some fundamental aspects of automated vehicles. It would cover a situation where external sensors indicate water on the road and the vehicle is able to sense significant tire wear and then decelerates to avoid hydroplaning. The current application doesn’t even attempt to explain how any of this is done; it is a description of a system that decides between different actions based on sensor and other inputs. Effectively they attempt to patent the exact thing every good driver does.
It should be noted that while the claims give an impression that this is about cars, it can be considered to cover other types of vehicles such as airplanes. In fact in the description trucks, motorcycles, busses, boats, airplanes, helicopters, lawnmowers, recreational vehicles, amusement park vehicles, trams, golf carts, trains and trolleys are mentioned as examples of vehicles.
Looking at the news, it seems driverless car development is all about sensor fusion. Adequate sensor technologies are available, but putting together a system that makes sense of all the information takes a lot of work. Protecting solutions to problems that are encountered during development is standard practice. If granted this would in a fairly broad manner give Google a handle over an important optimization aspect of driverless vehicles.
TIER 2: AVOIDING LICENSING
Using a FEM model incorporating current sensor information to predict the response of the vehicle to current conditions could be used to change the behaviour without resorting to selecting from a list of possible actions. It is difficult to say if this differs enough from the language of the claims to be outside the scope of this application, but it could be useful in any case.
The obvious bypass route is to not use information about damage or wear to components internal to the vehicle. This however could restrict how aggressively the computer could use the vehicle as it would in some cases need to make a worst case assumption about the state of vehicle systems.
TIER 3: TECHNICAL ANALYSIS
The inventive step seems to be missing so discussion of novelty is a bit academic, but looking at novelty of the different parts can show that their combination is fairly obvious. Using sensors to monitor the internal wear and damage is a known technology. By way of example: a Yamaha two stroke outboard motor I used at least a decade ago had an internal oil tank. In case the motor was out of oil it reduced the available power to avoid engine damage. I remember this as it happened to me while I was crossing a shipping lane. It was quite exciting for a while, as there was a largish ferry approaching a couple of kilometers away and I judged that if I failed in filling the tank I might not have enough time to get clear. As another example: automobile engine management systems may change to a different throttle response and ignition timing in case they lose some sensors feeding information regarding the state of the engine.
It is also common to have an indicator in the car that warns when the outside temperature is close to freezing. Several current models also offer systems that read speed limit signs with a camera and give this information to the driver. Information about automated speed traps can be downloaded to navigation devices.
Fusing all this information provided by these prior technologies is clearly necessary in an autonomous vehicle. It might be an invention if a novel way of doing this was shown, but is not enough to tell that there is a problem in need of a solution. To go back to my claim that this is what drivers do all the time; it might be an invention to show how to do, with a computer, what happens inside the head of the driver. This is because the prior knowledge on that is pretty much missing.
The description and figures are easy to follow, apart of some patentese which needs a couple of passes before being understood. Not much new is offered so the usefulness of the description to society is low. There doesn’t appear to be a step change from prior technology or knowledge so the invention is missing.
The claims are pretty straight forward and they clearly are derived from the description. Some elements seem to be missing though, like the idea where the vehicle checks in to a maintenance facility when it detects something in need of fixing. But this is likely well covered in sci-fi so it would not be new.
One thought on “Troglodyte: Driverless vehicles 2”
Comments are closed.